Sommaire
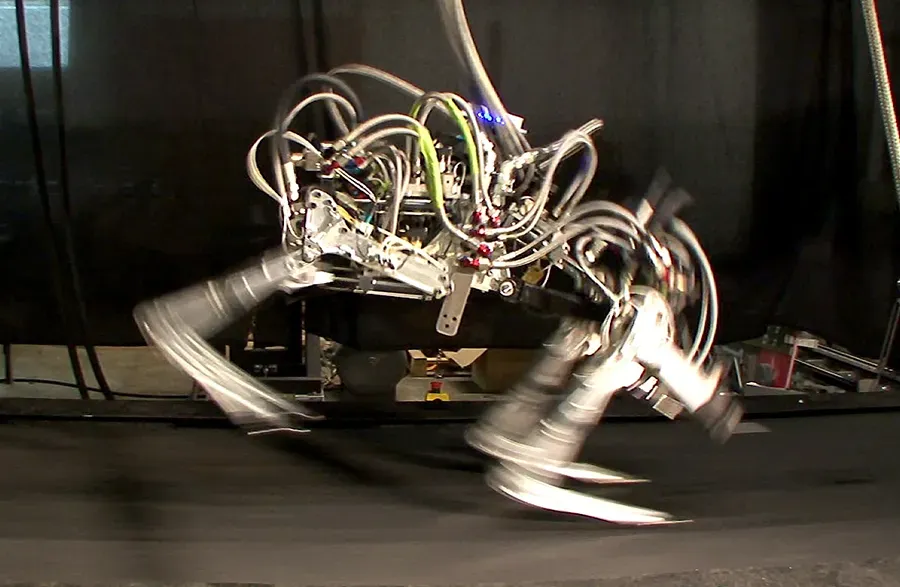
Cheetah, un robot quadrupède capable de franchir des obstacles
La robotique progresse rapidement : du simple automate aux machines dynamiques capables de courir et sauter. Cheetah, développé par des chercheurs du MIT, illustre cette avancée. La version 2 de ce robot quadrupède a démontré la capacité de détecter et franchir plusieurs obstacles en mouvement, rapprochant les robots des applications de terrain (recherche, secours, inspection).
Les essais menés
Les équipes du MIT ont testé Cheetah 2 dans deux configurations principales :
- Sur tapis roulant : le robot a couru et sauté successivement par-dessus trois obstacles de 27 cm, 34 cm et 40 cm de haut (ces hauteurs représentent à titre indicatif plus de la moitié de sa propre hauteur), en maintenant une vitesse d’environ 8 km/h. Les obstacles ont été insérés à intervalles fixes sur la bande pour simuler un parcours continu.
- En espace libre : les mêmes trois obstacles ont été disposés sur le sol à des distances variables les uns des autres. Cheetah 2 a détecté, planifié et exécuté les sauts en course, réussissant à franchir chaque élément sans chute notable.
Ces expérimentations montrent non seulement la capacité mécanique du robot à produire l’énergie nécessaire au bond, mais aussi la coordination entre perception (capteurs), planification et contrôle en temps réel.
Quels composants rendent cela possible ?
Sans entrer dans des spécifications techniques propriétaires, l’amélioration tient à plusieurs axes :
- Actionneurs et structure : moteurs et articulations conçus pour des mouvements explosifs et une absorption d’impact lors de l’atterrissage.
- Capteurs et perception : caméras et capteurs de profondeur permettant d’estimer la position et la hauteur des obstacles avant l’exécution du saut.
- Contrôle en temps réel : algorithmes capables d’ajuster la trajectoire et la puissance du saut en quelques centaines de millisecondes.
- Logiciels de planification : prise en compte de la dynamique du robot pour calculer des trajectoires viables et sûres.
À retenir : Cheetah 2 combine actionneurs puissants, perception et contrôle dynamique pour franchir plusieurs obstacles en course, rapprochant la robotique mobile des opérations sur terrains accidentés.
Tableau synthétique : performances observées
| Élément testé | Observation (Cheetah 2) | Remarque |
|---|---|---|
| Hauteurs des obstacles | 27 cm, 34 cm, 40 cm | Les hauteurs sont à titre indicatif ; le dernier dépasse la moitié de la hauteur du robot |
| Vitesse en course | ≈ 8 km/h | Vitesse maintenue pendant les sauts sur tapis roulant |
| Configuration | Tapis roulant et espace libre | Tests réalisés dans des environnements contrôlés |
| Capacité de planification | Franchissement successif sans erreur notable | Démonstration de coordination perception-contrôle |
Applications potentielles
Les capacités de franchissement et de locomotion dynamiques ouvrent plusieurs pistes d’application :
- Secours et intervention : accès à des zones encombrées ou difficiles après tremblements de terre, effondrements ou inondations pour repérer des victimes ou acheminer des capteurs.
- Inspection industrielle : franchir des décombres, des tuyauteries ou des obstacles sur des sites complexes (barrages, centrales, chantiers).
- Recherche en locomotion : plate-forme pour tester algorithmes de contrôle, apprentissage par renforcement et perception sensorielle.
Limites actuelles et défis à relever
Malgré la démonstration, plusieurs barrières techniques et pratiques demeurent :
- Robustesse et autonomie : tests sur tapis et en salle restent contrôlés ; la résistance à des environnements extérieurs (boues, pluie, débris pointus) n’est pas démontrée.
- Consommation énergétique : les sauts dynamiques demandent beaucoup d’énergie ; l’autonomie peut rester limitée sans solutions de batterie ou de gestion énergetique adaptées.
- Perception en conditions dégradées : poussière, fumée ou obscurité réduisent l’efficacité des caméras et capteurs optiques.
- Sécurité et coûts : pour un déploiement grand public ou de secours, il faut garantir sécurité, fiabilité et coûts raisonnables.
Perspectives et pistes d’amélioration
Pour passer du prototype aux applications utiles sur le terrain, plusieurs axes sont probables :
- Renforcement de l’enveloppe physique pour augmenter la résistance aux chocs et à l’usure.
- Fusion de capteurs (LIDAR, IMU, caméras thermiques) pour maintenir la perception en conditions difficiles.
- Optimisation énergétique : moteurs plus efficaces, récupération d’énergie à l’atterrissage, batteries à haute densité.
- Tests en environnements réels et opérationnels avec équipes de secours pour valider les scénarios d’usage.
Impact éthique et réglementaire
La mise en service de robots mobiles dynamiques dans l’espace public ou lors d’interventions soulève des questions : responsabilités en cas d’accident, protection des données collectées par les capteurs, acceptation par les équipes humaines. La collaboration entre ingénieurs, législateurs et premiers intervenants sera nécessaire pour définir des cadres sûrs et efficaces.
Questions fréquentes
Quel est l'intérêt principal de Cheetah 2 ?
Montrer que des robots quadrupèdes peuvent combiner vitesse, saut et perception pour franchir des obstacles, ouvrant la voie à des applications de secours et d'inspection.
Les tests ont-ils eu lieu en extérieur ?
Les démonstrations rapportées ont eu lieu sur tapis roulant et en salle ; la robustesse en extérieur n'a pas été mise en évidence ici.
Est-ce que Cheetah 2 peut remplacer les équipes de secours ?
Non, il s'agit d'un outil d'appoint : il peut accéder à des zones dangereuses pour aider la prise d'information, mais ne remplace pas le jugement et l'intervention humaine.
Quels sont les principaux obstacles techniques à régler ?
L'autonomie énergétique, la résistance aux conditions réelles, et la perception fiable en environnements dégradés restent des défis majeurs.